
实验3 基于RFID的室内定位
★ 具体的应用场景
(1).基于静态扫描的绝对定位:在办公室内广泛布置坐标已知的参考标签,办公人员随身携带带有标签的胸牌,通过标签之间RSSI的相似性,系统就可以推断出人员的大致位置。
(2).基于动态扫描的相对定位:图书馆书籍错放的情况常有发生,对于图书管理是一个重要挑战。如果每本书籍都粘贴有具有唯一ID的标签,那么通过天线的一次扫描获取各标签的相位数据,分析各标签到达相位谷底时刻的先后顺序,就可以快速识别是否有书本错放。
8.3.1 基于静态扫描的定位
8.3.1.1 实验目标
1) 学习基于参考节点的RFID静态定位技术。
2) 了解LANDMARC算法。
8.3.1.2 实验原理
参考标签,即具有固定参考位置的标签,在定位系统中可作为参考点来辅助定位。LANDMARC算法[1]通过实时获取参考标签和待定位标签的RSSI,筛选出与待定位标签RSSI最相近的n个参考标签,根据RSSI的相似程度计算这n个参考点的权重,进而加权估算待定位标签的位置。由于LANDMARC算法能够实时获取RSSI,因此可以自适应环境的变化,使得定位更加精准、可靠。
下面以图8.17的标签阵列为例,详细说明LANDMARC的工作流程。两个天线正对标签阵列,一个对齐标签阵列左边界,另一个对齐右边界。经过一次扫描,两个天线分别获得了各标签的RSSI,因此每个标签有两个RSSI,记为<RSSI1, RSSI2>,RSSIi表示第i个天线获取的RSSI。T7为待定位标签,其余为参考标签。根据各标签的<RSSI1, RSSI2>计算T7与其他标签之间的距离,选择距离最小的4个标签作为邻近标签,如T2/T6/T11/T13。最后利用邻近标签的坐标,反距离权重加权投票估算T7的坐标。
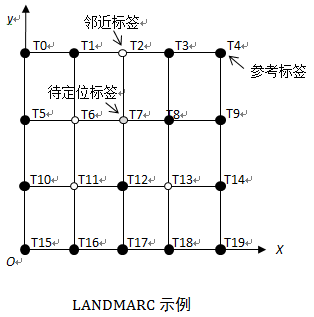
图8.17 LANDMARC示例
8.3.1.3 实验设备
Impinj Speedway R420阅读器1台,Impinj天线2个,笔记本1台,RFID标签20个,路由器1台。
8.3.1.4 实验内容
- 实验准备。搭建实验环境,如图1所示。部署实验场景,如图8.18所示。
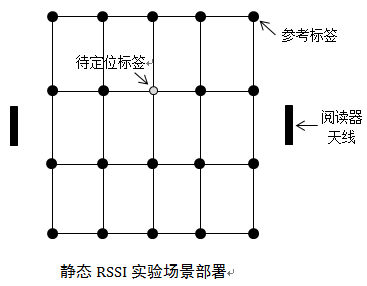
图8.18 静态RSSI实验场景部署
- 读取待定位标签的RSSI,记录为S = (S1,S2),Si表示由天线i获取的标签的RSSI。
- 读取参考标签的RSSI,记录为θ_j=(θ_j1,θ_j2 ),j表示第j个参考标签,表示由天线i获取的参考标签j的RSSI。
- 计算待定位标签与参考标签RSSI之间的欧式距离。

Ej表示待定位标签和参考标签r_j之间的位置关系,值越小表示越接近。一共有19个参考标签,所以可以得到RSSI欧式距离向量 E = (E1,E2,…,E19)。
- 比较Ej,选择最小的4个参考标签,即与待定位标签最接近的4个参考点。
- 计算4个最近参考点的权重。
w_j表示第j个最近参考点的权重。
- 估算待定位标签坐标(x^,y^)。
(x_i,y_i )为参考点的已知坐标。
- 评估定位精度。
(x,y)为待定位标签的真实坐标。
8.3.1.5 实验结果
完成上述实验,填写表8.9、表8.10。
| 标签编号 | x坐标 | y坐标 | RSSI1 | RSSI2 | RSSI距离 | 4-近邻
(是/否) |
| 参考标签1 | ||||||
| 参考标签2 | ||||||
| … | ||||||
| 参考标签19 | ||||||
| 待定位标签 |
表8.9 标签阵列坐标及RSSI值
| 标签编号 | x坐标 | y坐标 | 估算x坐标 | 估算y坐标 | 误差 |
| 待定位标签 |
表8.10 待定位标签定位结果
8.3.2 基于动态扫描的定位
8.3.2.1 实验目标
- 了解RSSI与距离的变化关系,利用RSSI的变化确定标签的相对位置;
- 学习标签与天线相对运动过程中相位值的变化规律,尝试利用该变化规律对标签进行相对定位。
8.3.2.2 实验原理
假设一组标签沿着平行于天线的方向水平排列。当标签沿着平行于标签排列的方向,从天线的一侧移动到另一侧时,标签与天线之间的距离先减小后增大。当标签垂直经过天线时,距离最小。
- 利用RSSI进行相对定位
标签到天线之间的距离越小,天线得到的标签RSSI越大。所以,当标签垂直经过天线时,距离最短,此时标签应有最大RSSI值。对应地,连续扫描过程中RSSI值最大的时刻,标签恰好到达与天线垂直的位置。图8.19表示了标签从天线一侧水平移动到另一侧的过程(类似于图8.2)中RSSI的可能变化情况,在时间为15-16时,RSSI有最大值-50dBm,因此可认为标签垂直经过天线的时刻在15-16之间。
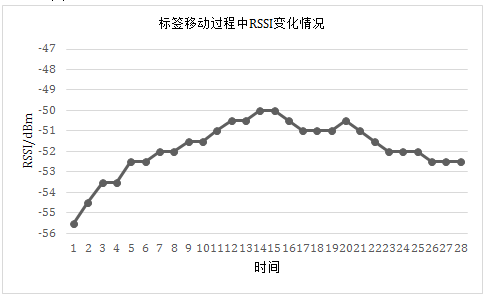
图8.19 标签移动过程中RSSI变化情况
现实环境中,由于多径效应、环境噪音等影响,RSSI与距离的变化关系会有所波动,也就说是,当天线垂直经过标签时RSSI没有到达最大值,即RSSI最大值对应的时刻天线不在标签的垂直点处,因此利用RSSI进行定位精度可能较低。
- 利用相位值进行相对定位
相位值ϕ与距离d有关,计算公式为ϕ=2π/λ d,其中表示波长。在天线移动过程中,距离先减后增,所以相位值也先减后增,在垂直点处有最小值,整体呈V型。因此,根据标签相位到达最小值的顺序就能够判断标签之间的相对位置关系,标签经过阅读器的顺序与其相位到达最小值的顺序相同。
商用阅读器返回的相位值并不是真实值,经过了特殊处理,最明显的变化是返回值的范围[0, 2π),因此在利用相位值分析之前先要对返回值进行处理。以Impinj阅读器为例,令ϕ为阅读器返回的相位值,ϕ‘为分析用相位值,两者的关系为ϕ‘=mod(-ϕ,2π)。如返回相位值为6.1,先取负再模2π,得分析用相位值0.1832。不同的商用阅读器对于相位值的处理可能不同,这里只是举一个简单的例子。尽管相位值被分割为多个片段,但是仍旧保留了标签垂直经过阅读器时相位值的变化情况,即V型谷底附近的特征,所以只要提取中V型相位的中间带有谷底的片段,就可以用来分析标签相位到达最小值的时间顺序,从而判断标签的相对顺序[2]。
假设三个标签水平排列,从天线的右侧水平移动到左侧,如图8.20所示。图8.21为三个标签的带有V型谷底的中间相位的分析结果,可以看到相位到达谷底的顺序为Tag1-Tag2-Tag3,因此Tag1早于Tag2经过阅读器天线,Tag2早于Tag3经过阅读器天线,结合标签运动方向为从阅读器的右边移动到左边,所以标签从左到右的顺序为Tag1-Tag2-Tag3。对比图8.20可知,推断的标签顺序与标签真实的顺序相同,所以通过标签相位到达最小值的顺序判断标签之间的相对关系具有可行性。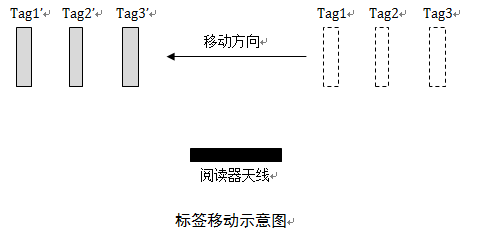
图8.20 标签移动示意图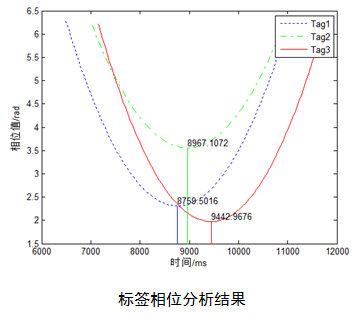
图8.21 标签相位分析结果
8.3.2.3实验设备
Impinj Speedway R420阅读器1台,Impinj天线1个,笔记本1台,RFID标签3个,路由器1台,移动设备1套。
8.3.2.4 实验内容
- 实验准备。搭建实验环境,如图8.1所示。部署实验场景,如图8.20所示。
- 水平移动标签阵列,连续记录不同时刻标签的RSSI和相位值,导出每个标签的RSSI数据和相位值数据。
- 分析三份RSSI数据。找到Tag1-Tag3的RSSI最大时对应的时刻t_max1-t_max3,对t_max1-t_max3从小到大进行排序,以判断标签的相对顺序。
- 对三份相位值数据进行预处理,得到新的三份分析用相位值数据。
- 分析处理后的相位值数据,过滤异常点。由于环境噪声以及硬件自身特性,在一串连续的相位值中可能存在一个异常点,与其真实值相差π,需要对这些异常点做特别处理(过滤或校正)。
- 分析过滤后的相位值,根据相位值的变化情况,提取相位中间V型片段。
- 中间V型片段拟合。利用二次函数拟合V型区相位散点,计算谷底对应的时刻t1-t3。对t1-t3从小到大进行排序,以判断标签的相对顺序。
8.3.2.5 实验结果
完成上述实验,分析RSSI文件和相位文件,填写表8.11。
| 标签编号 | RSSI最大值对应时刻 | RSSI估算顺序 | 相位谷底对应时刻 | 相位估算顺序 |
| Tag1 | ||||
| Tag2 | ||||
| Tag3 |
表8.11 动态相对定位结果
参考文献
[1] Ni L M. Liu Y. Lau Y C. et al. LANDMARC: Indoor Location Sensing Using Active RFID[C]. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications (PerCom 2003). Texas, 2003: 407-415.
[2] Shangguan L. Yang Z., Liu A X. et al. Relative Localization of RFID Tags using Spatial-Temporal Phase Profiling. In Proceedings of USENIX NSDI, 2015.