
实验2: RFID标签反射信号分析
★ 实验二演示视频
★ 具体应用场景
行为识别,定位追踪。
这两个应用场景均需要用到对标签位置、状态的感知,而通过标签平移和旋转,可以获取标签在不同位置、状态下的信号值,观察规律,用于行为识别、定位追踪应用场景。
8.2.1 实验目标
通过实验观察RFID标签在线性移动和旋转两种动态场景下的信号变化情况,并分析得到规律。观测信号值包括RSSI (Received Signal Strength Indication)和相位值(Phase)。
8.2.2 实验原理
RFID标签的信号值(RSSI、相位值)与许多因素相关,包括标签与天线的相对距离、相对摆放角度、环境因素等等。本次实验主要考虑的是标签与天线的相对距离对信号值的影响,分别在线性移动和旋转这两种动态场景下进行了实验。
- 线性移动在线性移动过程实验中,改变标签和天线的相对距离,其他条件保持相对一致,观察标签信号值的变化规律。传输过程中无线信号会发生能量损耗,损耗与路径长度相关,路径越长,损耗越多。也就是说,对于相同能量的初始信号,标签与天线的相对距离越大,标签返回信号的信号强度越小。同时,随着相对距离的改变,电磁波散射与反向散射总路程长度改变,信号相位值也发生相应改变。线性移动过程分为纵向移动和横向移动,分别进行实验,如图8.3所示。两种移动均从初始位置ls移动到终止位置le。纵向移动过程中,天线和标签的相对距离不断增大。横向移动过程中,天线和标签的相对距离先减小后增大,但天线与标签的移动方向的垂距保持不变。
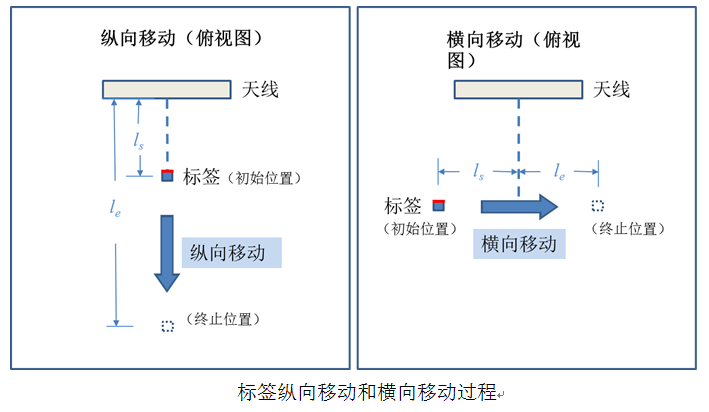
图8.3
在纵向移动过程中,单步移动距离i,从初始位置ls移动到终止位置le,并通过阅读器获取标签信号值,图8.4和图8.5的实验结果供参考。随着距离的均匀增大,可以观察到RSSI和相位值均产生线性变化。
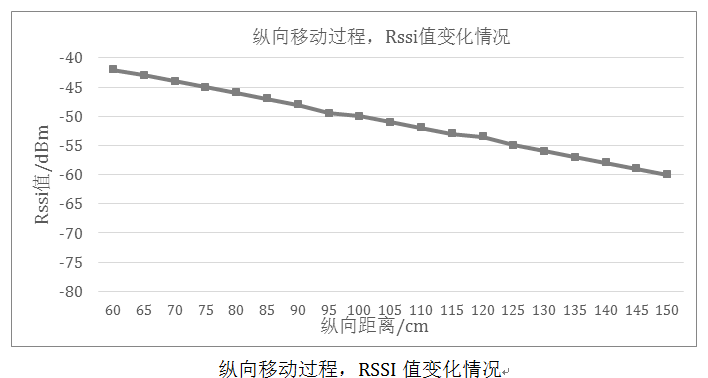
图8.4
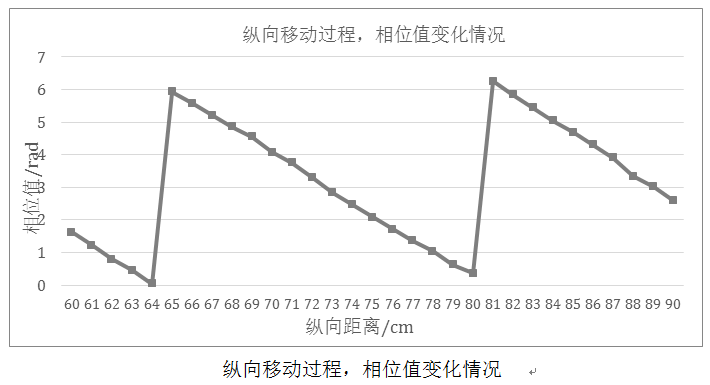
图8.5
同样的,在横向移动过程中,单步移动距离i,从初始位置ls移动到终止位置le,并通过阅读器获取标签信号值,图8.6和图8.7的实验结果供参考。随着标签与天线的相对距离先减小后增大,可以观察到RSSI和相位值的变化均为对称图像,对称点在横向移动的垂直点处。注意到两个信号值的变化趋势呈非线性的曲线,即随着标签远离垂直点,信号值的变化越来越快。这是由于在远处,单步移动距离i导致的天线与标签相对距离改变较近处更大,从而使信号变化产生图示非线性规律。
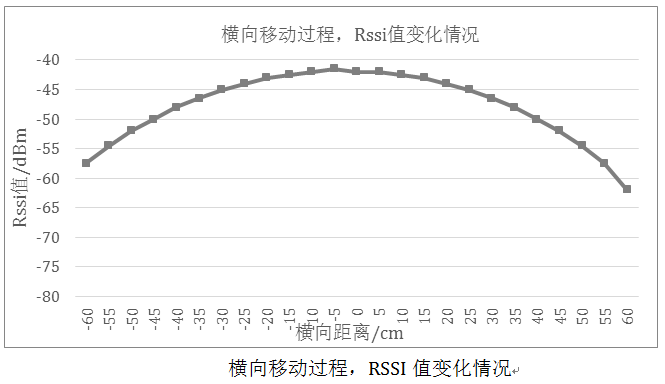
图8.6
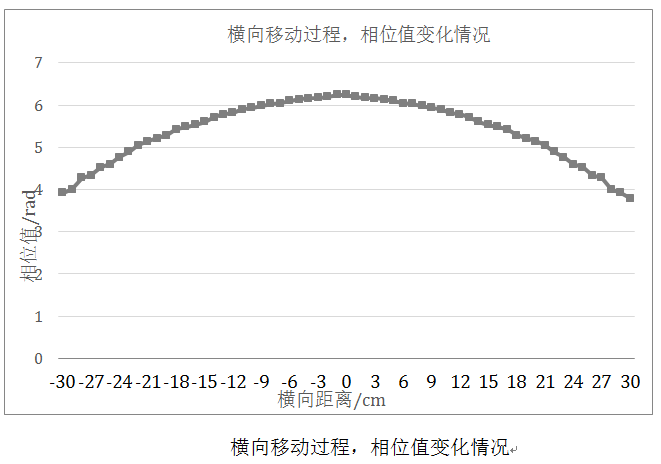
图8.7
- 旋转
在标签旋转实验中,改变标签和天线的相对摆放角度,其他条件保持相对一致,观察标签信号值的变化规律。由于RFID标签(大部分是RFID标签天线)是一个几何面,所以标签和天线的相对摆放角度对于信号有影响。
标签旋转分为标签绕自身长轴旋转和标签绕自身短轴旋转,分别进行实验,如图8.8、图8.9所示。两种旋转均从俯视图中标记的-90°开始,每次顺时针旋转15°,最终完成一周旋转回到-90°,记录不同角度情况下的信号值。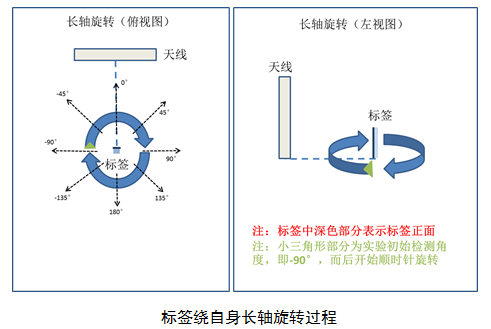
图8.8 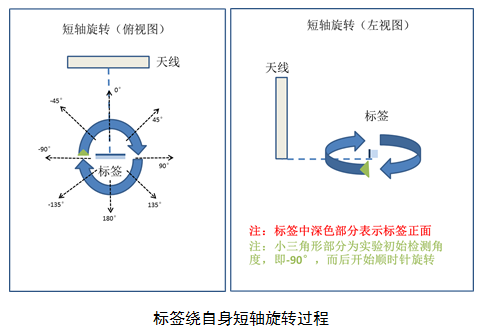 图8.9
图8.9
在标签绕长轴旋转过程中,图8.10和图8.11的实验结果供参考。可以发现,当标签绕自身的长轴旋转时,识别性能几乎不受影响,RSSI值和相位值基本不变,只有小幅震荡。
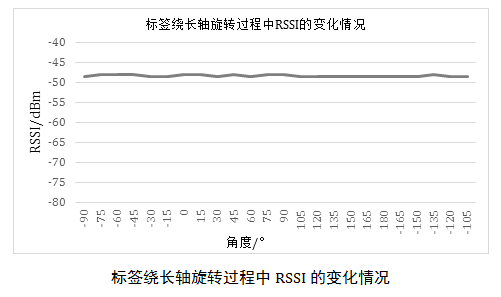 图8.10
图8.10 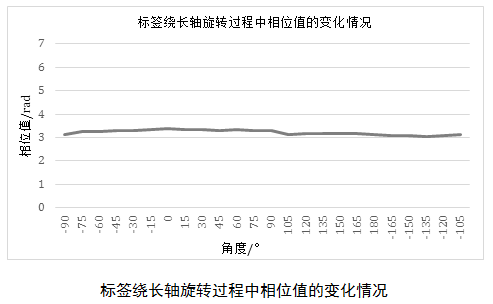 图8.11
图8.11
在标签绕短轴旋转过程中,图8.12和图8.13的实验结果供参考。可以发现,当标签绕自身的短轴旋转时,识别性能受到较大影响,RSSI值和相位值在旋转过程中呈周期性变化。当标签平面与天线的中心辐射方向趋近于平行时,即角度为0°或180°时,RSSI有最小值,相位值变化率最大。反之,当标签平面与天线的中心辐射方向趋近于垂直时,即角度为-90°或90°时,RSSI有最大值,相位值变化率最小。
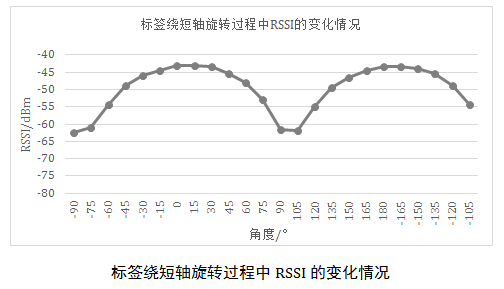 图8.12
图8.12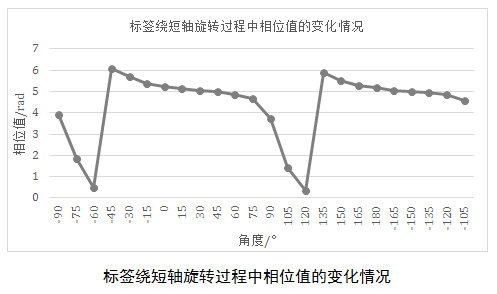 图8.13
图8.13
8.2.3 实验设备
Impinj Speedway R420阅读器1台,Impinj天线1个,笔记本1台,RFID标签1个,路由器1台,移动设备1套。
移动设备如图8.14-8.16所示,该设备可实现物体(RFID标签、手机、平板等)的平移、旋转,该过程可以是连续的,也可以是逐步进行的。
 图8.14 线性移动设备远景
图8.14 线性移动设备远景 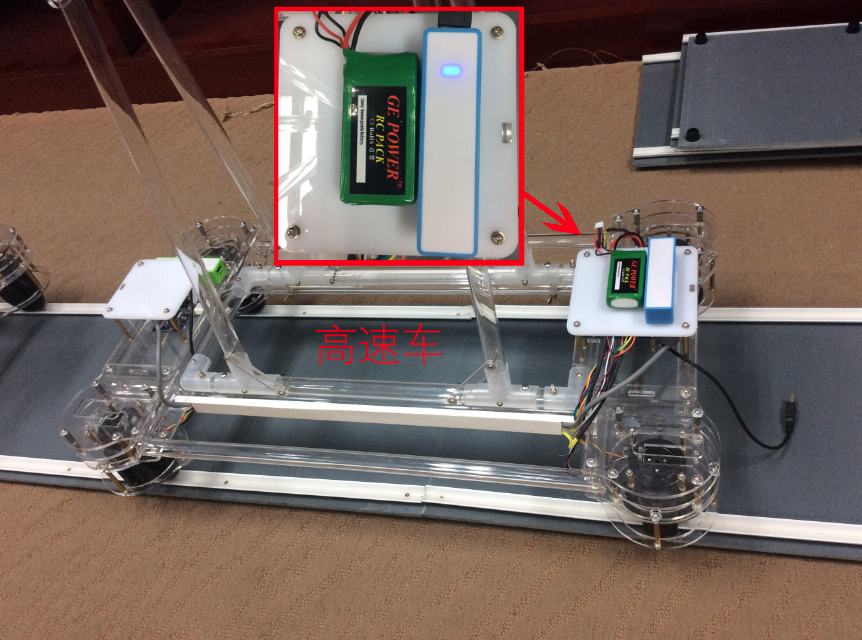 图8.15 线性移动设备近景
图8.15 线性移动设备近景
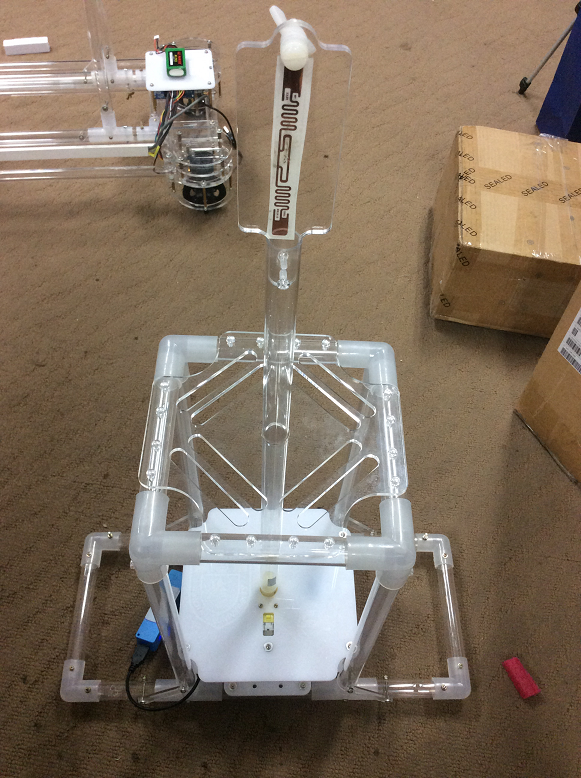 图8.16 旋转移动设备
图8.16 旋转移动设备
8.2.4 实验内容
- 线性移动
- 实验准备。搭建实验环境,如图1所示。
- 将RFID标签固定在线性移动设备上,部署实验场景,如图3所示。纵向移动实验中,测RSSI时,参数取ls=60cm,le=160cm,i=5cm;测相位值时,由于相位值对于距离变化比较敏感,参数调整为 le=80cm,i=1cm。横向移动实验中,测RSSI时,垂直距离取60cm,ls=le=100cm,i=10cm;测相位值时,参数调整为ls=le=40cm,i=2cm。根据实验结果规律明显与否,可动态调整实验参数。
- 运行程序,逐步获取RFID标签的RSSI和相位值。
- 填写表格,并绘制图像观察规律。
- 旋转
- 实验准备。搭建实验环境,如图1所示。
- 将RFID标签固定在旋转设备上,将天线放置于距离移动轨道垂距60cm处,其它实验部署如图8、图8.9所示。
- 长轴/短轴旋转均从部署中-90°位置开始顺时针旋转,每次15°。运行程序,获取各角度的标签RSSI和相位值。
填写表格,并绘制图像观察规律。
3.2.5 实验结果
完成上述实验,分别根据标签线性移动过程和旋转过程得到的结果,填写下表,并绘制坐标图。
- 线性移动按照表8.5和表8.6的格式,分别记录纵向移动和横向移动的实验结果,并绘制坐标图,分析实验结果。
距离l/cm le= … ls= RSSI/dBm 表8.5 线性移动过程中不同位置的RSSI(横向/纵向)
距离l/cm le= … ls= 相位值/rad 表8.6 线性移动过程中不同位置的相位值(横向/纵向)
- 旋转按照表8.7和表8.8的格式,分别记录标签绕长轴旋转和标签绕短轴旋转的实验结果,并绘制坐标图,分析实验结果。
角度/° -90 -75 -60 -45 -30 -15 0 15 30 45 RSSI/dBm 角度/° 60 75 90 105 120 135 150 165 180 -165 RSSI/dBm 角度/° -150 -135 -120 -105 RSSI/dBm 表8.7 标签旋转过程中不同角度的RSSI(长轴/短轴)
角度/° -90 -75 -60 -45 -30 -15 0 15 30 45 相位值/rad 角度/° 60 75 90 105 120 135 150 165 180 -165 相位值/rad 角度/° -150 -135 -120 -105 相位值/rad 表8.8 标签旋转过程中不同角度的相位值(长轴/短轴)